自動加工用途では、従来のパワーチャックは不規則なワークピースの確実なクランプにしばしば困難を抱えます。
この需要に応えるために、AUTOGRIPはロボットによる荷役作業のための指パワーチャックワークホールディングデバイス(2J-08)を開発しました。
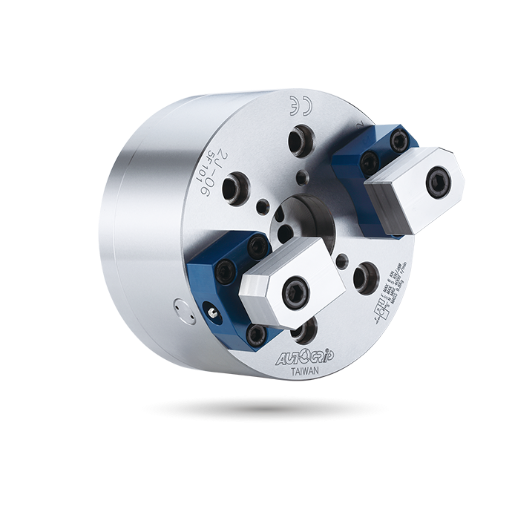
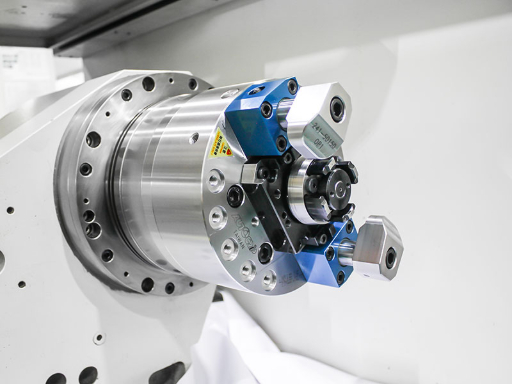
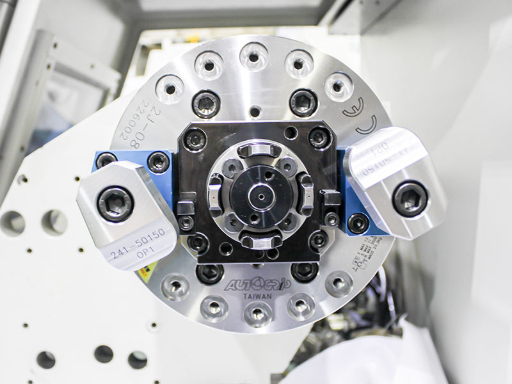
チャックはワークピースを端面から把握し、下向きのクランプ動作を適用します。補償顎機構を備え、不規則な表面に効果的に適応し、安定したクランプを保証します。
気密圧力検出機能を備えたチャックは、クランプ状態を継続的に監視できます。不適切なクランプや部品の欠落、異常が発生した場合、システムは即座に警告を発し、誤加工や機器の損傷を防ぎます。
この機能は、切りくずの侵入を減少させ、メンテナンスの必要性を低下させ、安定した加工性能を保証します。
補償メカニズム: 標準チャックの制約を克服し、不規則な表面を確実にクランプします。
気密圧力: クランプ状態をリアルタイムで監視し、信頼性のある操作を保証します。
高い信頼性: 加工の安定性を向上させ、長期的な品質を保証します。
関連製品 : フィンガーパワーチャック(2Jタイプ) >